Die Aussteller der SPS 2026 werden voraussichtlich ab Frühjahr 2026 veröffentlicht. Bis dahin finden Sie hier die Aussteller und Produkte der SPS 2025.
Ausstellersuche von 2025
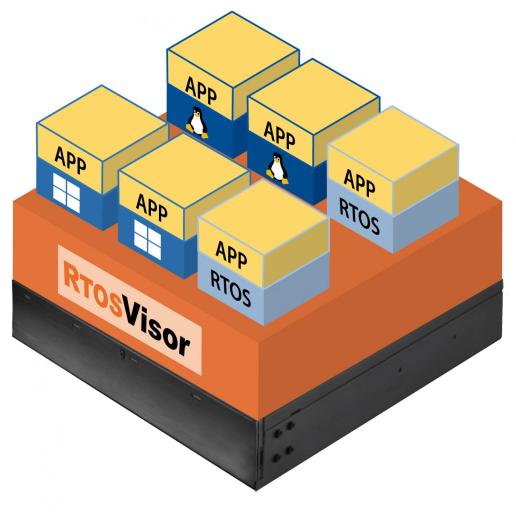
RTOSVisor, Type 1 Real-time Hypervisor
RTOSVisor, Type 1 Real-time Hypervisor
Beschreibung
Die acontis RTOSVisor-Lösung ist ein Echtzeit-Hypervisor vom Typ 1, der eine optionale und unabhängige Erweiterung der Echtzeit-Hypervisor-Lösungen vom Typ 2 von acontis für Windows (LxWin und VxWin) darstellt. Mit dieser Lösung können Kunden Anforderungen an anspruchsvollere Anwendungsfälle erfüllen. Es eignet sich perfekt für IIoT-Geräte (Industrial Internet of Things), Edge-Controller, High-End-Echtzeithardware und Workload-Konsolidierung.
Mit der branchenerprobten Real-Time-Hypervisor-Technologie von Acontis können mehrere harte Echtzeit-Betriebssysteme wie Real-Time Linux und VxWorks nativ ausgeführt werden. Die Lösung umfasst KVM, das den gleichzeitigen Betrieb mehrerer Standardbetriebssysteme wie Windows und Linux (Ubuntu, Debian, Fedora und viele andere) ermöglicht. KVM bietet virtuellen Hardwarezugriff und Paravirtualisierung, was zu einer verbesserten Leistung führt. KVM unterstützt außerdem Hardware-Passthrough von PCI-, USB- und VGA-Geräten und sorgt so für die bestmögliche Leistung.
Jedes Gastbetriebssystem ist völlig unabhängig und separat, was bedeutet, dass ein Betriebssystem neu gestartet oder heruntergefahren werden kann, ohne dass dies Auswirkungen auf die anderen hat. Diese Funktion bietet Kunden die Flexibilität, ihre Systeme ohne Unterbrechungen zu verwalten.