RTOSVisor, Type 1 Real-time Hypervisor
RTOSVisor, Type 1 Real-time Hypervisor
Description
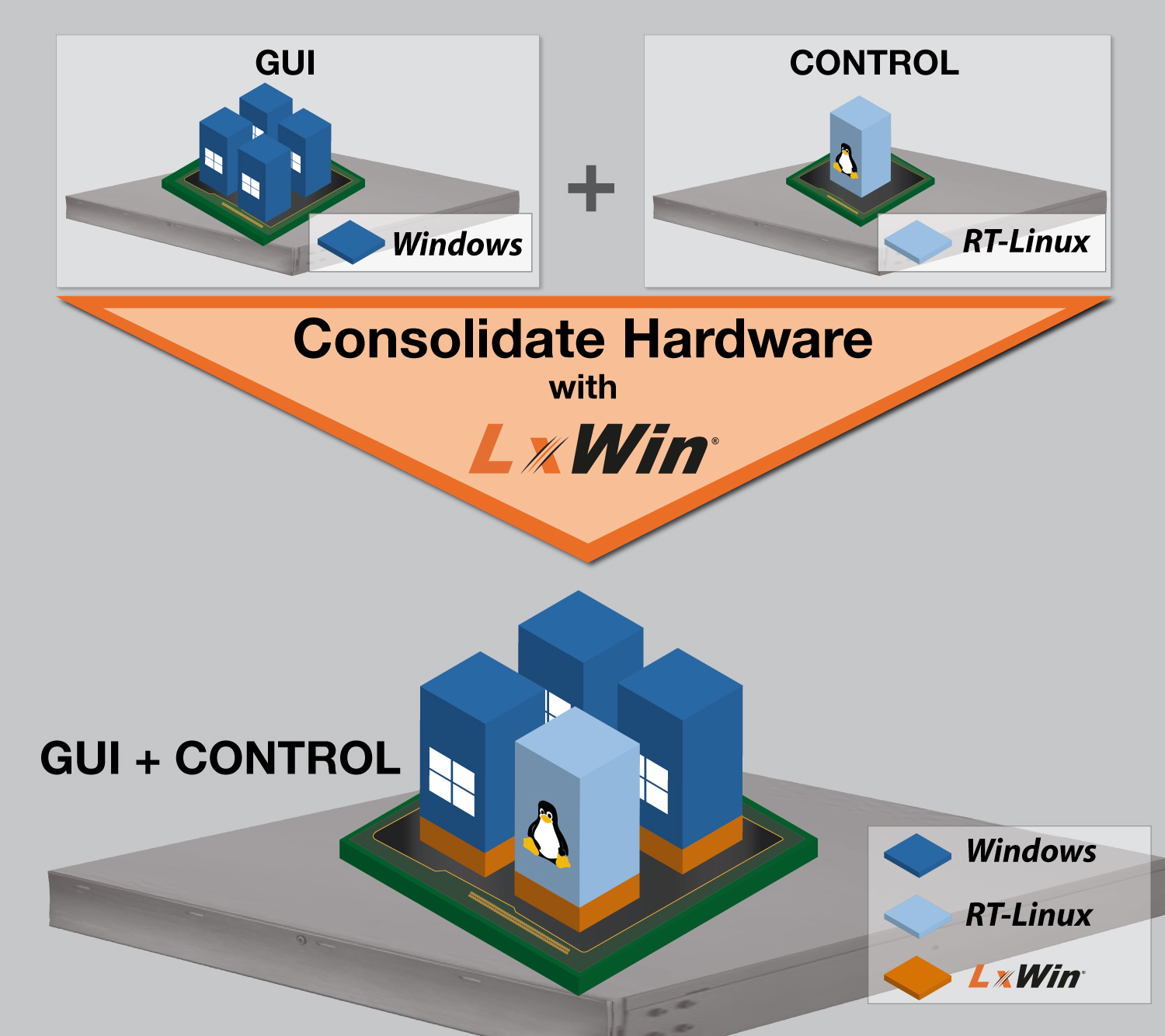
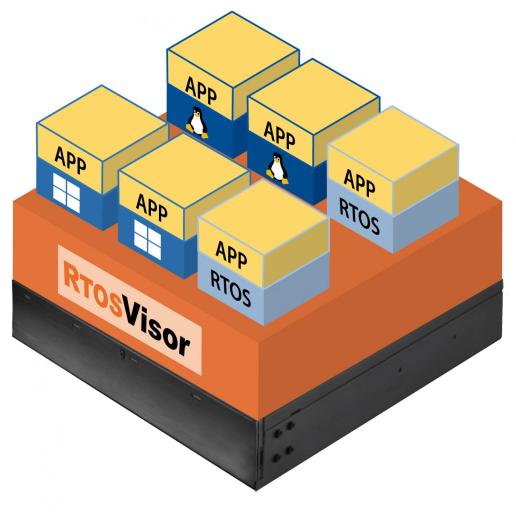
The acontis RTOSVisor solution is Type 1 Real-time Hypervisor that is an optional and independent enhancement of acontis' Type 2 Real-time Hypervisor solutions for Windows (LxWin and VxWin). This solution enables customers to fulfill demands for more sophisticated use cases. It is a perfect fit for Industrial Internet of Things (IIoT) devices, Edge Controllers, high-end Real-time hardware, and workload consolidation.
With acontis' industry-proven Real-time Hypervisor technology, multiple hard Real-time operating systems such as Real-time Linux and VxWorks can run natively. The solution incorporates KVM, which allows multiple standard operating systems like Windows and Linux (Ubuntu, Debian, Fedora, and many others) to operate simultaneously. KVM provides virtual hardware access and paravirtualization, which results in improved performance. KVM also supports hardware pass-through of PCI, USB, and VGA devices, ensuring the best possible performance.
Each guest OS is entirely independent and separate, which means that one OS can be restarted or shut down without affecting the others. This feature provides customers with the flexibility to manage their systems without any interruptions.